00971-47266767








Description:
Remote control function:one-key take-off/one-key landing/up/down/left/right steering/intelligent obstacle avoidance/360°rolling/headless mode/fast and slow gear/direction fine-tuning/up and down ESC camera/one-button return to home/.
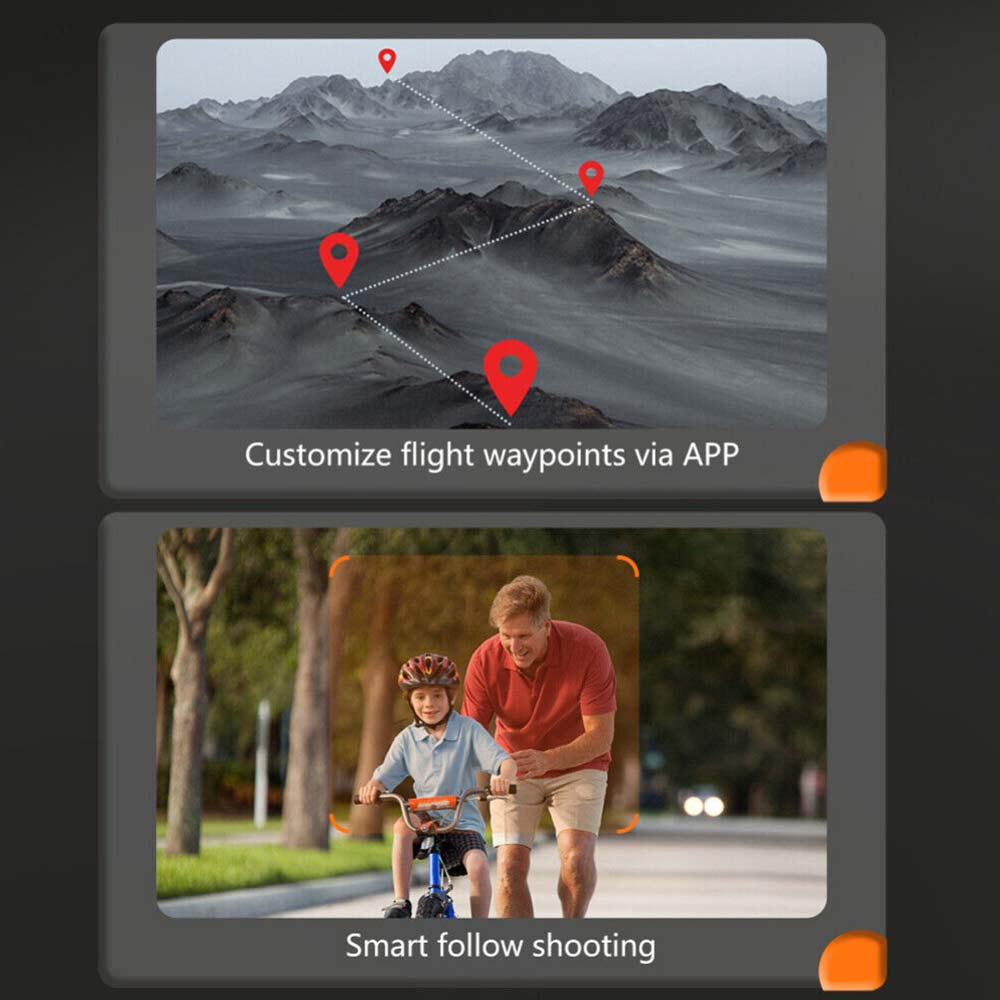
Aerial photography APP function: one-key takeoff/one-key landing/up/down/left/right turn/smart obstacle avoidance/smart follow/up and down ESC camera/360° roll/headless mode/fast/slow gear/photograph/video/switch dual Camera/face/gesture recognition automatic photo/gravity sensor/trajectory flight/positioning flight/one-key return to home.
Image transmission signal: UAV comes with WIFI signal.
Video resolution: front camera 2560*1440, bottom camera 2560*1440.
Photo resolution: front camera 2560*1440, bottom camera 2560*1440.
Specification:
Product material: plastic metal electronic components
Adjust the camera: steering gear remote control electric adjustment 90°
Product color: orange/black
Gesture photo recognition distance: 1-3 meters
Charging method: USB cable charging
Remote control mode: left hand throttle
Flight time: about 20 minutes with a single battery
Package:
remote control*1
spare blade*4
Body battery*3
USB cable*1
Protective frame*4
Screwdriver*1
Manual*2
Packing box*1
Storage box*1



